


D3PM-1100-P3 Delta robots
Produkta raksturojums
Raksturīgs
1、Standarta cikla laiks ir mazāks par 0,4 s, kas atbilst jūsu centieniem pēc liela ātruma un minimālā skaļuma.
2, uzlabots rotācijas motora dizains uz kustīgas platformas, ļauj robotam viegli sasniegt augstu rotācijas precizitāti.
3、Robots ir ideāli piemērots operācijām šaurās telpās, kā arī ātrgaitas un augstas precizitātes 3C laukā.Plaši izmanto nelielu sagatavju montāžā, apstrādē un testēšanā.
Produkta parametri
| Tips | D3PM-1100-P3 | |
| Cirvji | 3+1 | |
| Lietderīgā slodze | 3 kg | |
| Manipulators | Svars | 85 kg |
| Diametrs | 1100 mm | |
| Atkārtojamība | Pozīcija | 0,05 mm |
| Rotācija | 0,05° | |
| Maksimālais ātrums | 500pp/min | |
| Rotācijas diapazons | ±360 | |
| Pieļaujamais maksimālais inerces moments | 31 × 10-4kg .m2 | |
| Darbinātās rokas leņķa diapazons | Uz augšu | 32,5º |
| Uz leju | 68,5º | |
| Enerģijas padeve | Trīsfāzu 380VAC -10%~+10%, 49~61HZ | |
| Jaudas jauda | 10KVA | |
| Nominālā jauda | 6.1kw | |
| Uzglabāšanas temperatūra | -10 ℃ ~ 70 ℃ | |
| Darba vide | -10℃~50℃, RH≤80% | |
| Aizsardzība | IP55 | |
Produkta zīmējums
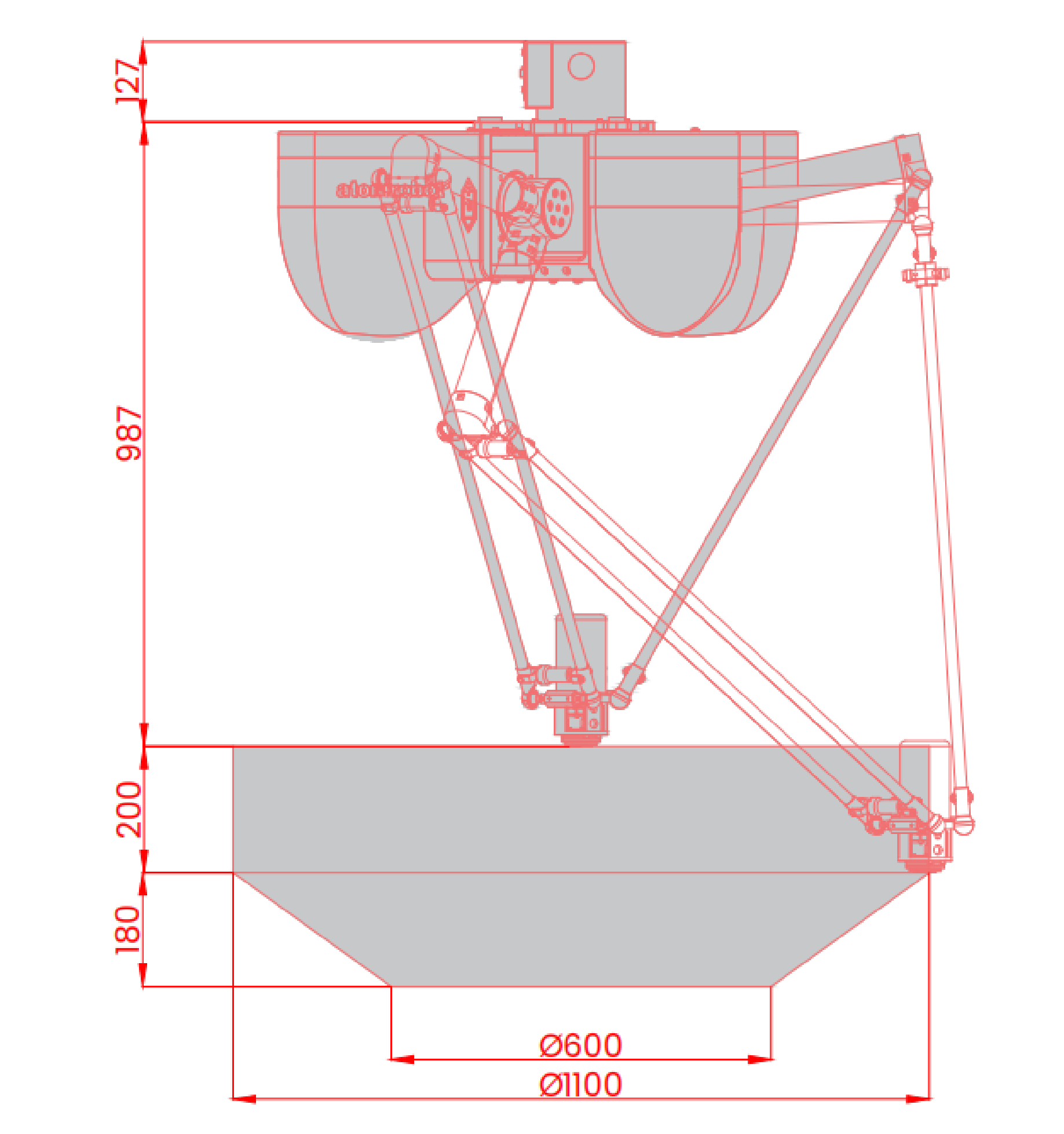
01. Izmēri un darba diapazons (mm)
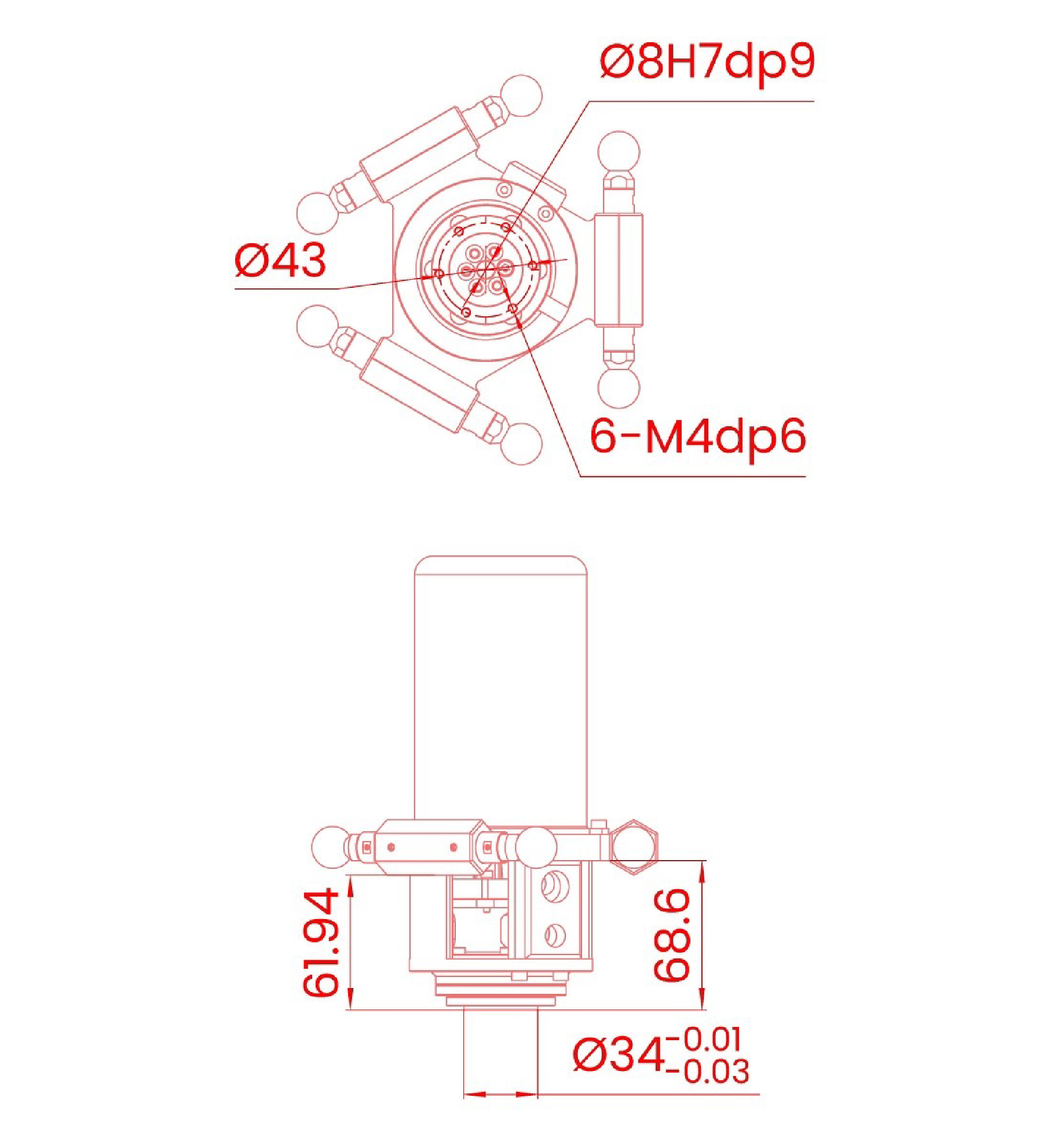
02. Atloks (mm)
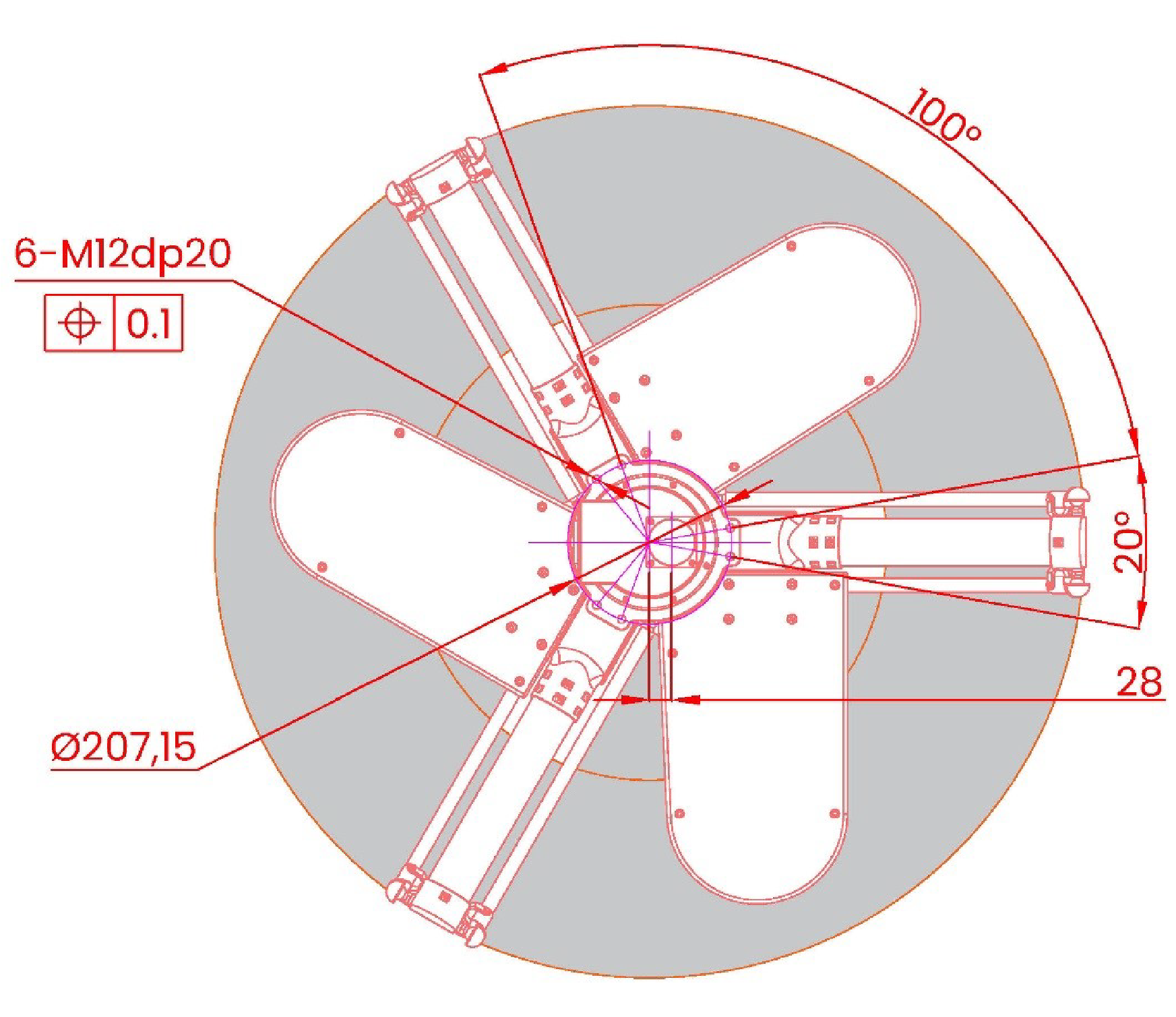
03. Pamatnes uzstādīšana (mm)
Uzrakstiet savu ziņu šeit un nosūtiet to mums





